



港口機械減速裝置失效機理及安全應用
2019-12-18胡吉全
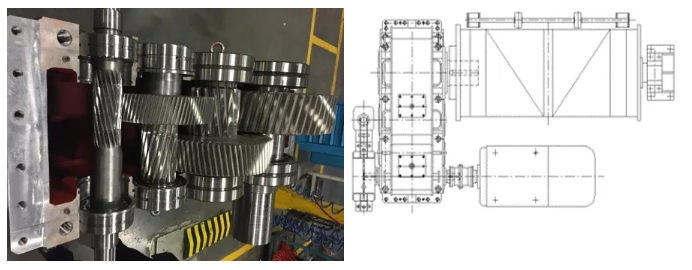
01 港機減速裝置的失效形式減速裝置是港口機械Z常用的傳動部件,在目前技術狀況下,所有的工作機構均需通過減速裝置以實現運動速度和扭矩的正常傳遞。根據機構工作要求不同,港口機械常采用臥式平行軸、立式行星和“三合一”傳動等減速裝置。

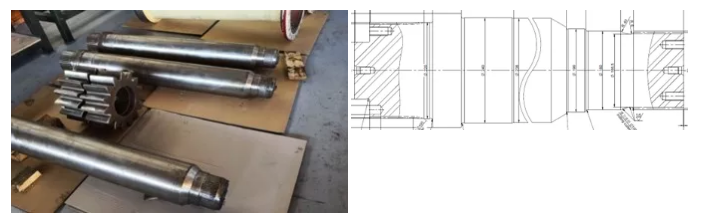
傳動軸變形
主要發生在減速裝置的高速軸。特別是變頻調速的傳動系統,經常采用電機超頻特性以提高工作速度,在基頻或低頻狀態下,減速裝置傳動軸運轉正常,當電機超頻輸入高速度時,容易造成高速傳動軸變形而出現徑向擺動,甚至與透蓋擦碰打火等失效形式,該現象且不受滿載或空載的影響。
港機減速裝置斷軸已成為Z為常見的失效形式,對于小慣量機構,如:起升機構等,斷軸主要出現在高速級;對于大慣量機構,如:門座起重機的回轉機構、大車運行機構等,斷軸主要出現在低速級。
港機減速裝置齒輪粘合和斷齒也是比較典型的失效形式。
齒輪粘合比較多出現在減速裝置承受單向齒輪嚙合力的場合,像具有位能性載荷的起升機構。
斷齒主要有疲勞斷齒和沖擊斷齒,疲勞斷齒可能發生在任何一級傳動齒輪,沖擊斷齒主要發生在低速級。

港機減速裝置軸承失效主要表現為滾動體與滾道膠合,保持架碎爛,其中高速級容易出現過熱和保持架碎爛,低速級容易出現潤滑不良至滾道膠合。

1.港口機械的特征
要分析港口機械減速裝置的失效機理,應先了解港口機械與其他起重機械相比所具有的特征。
工作特征
1)重復短時循環作業
工作過程中機電設備循環性的啟動、制動,正反方向運行;
2)快速高效作業
單位時間工作循環次數多,作業時間長;
3)多機構聯合作業
每一次作業任務的完成需要多個機構協同工作。
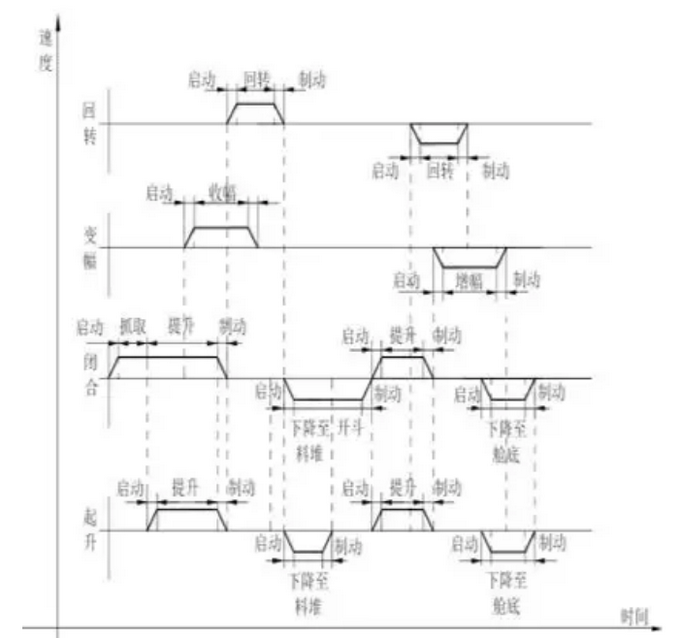
抓斗門機作業循環如下圖:
1)承受相對復雜的動載荷
由于港口機械重復短時循環,頻繁的正反方向啟、制動,傳動系統不斷的加速、減速運動變換,造成由慣性載荷派生出的動載荷、沖擊載荷特性尤其突出,且動載荷的變化幅度大,作用頻繁。
2)承受大小變化的位能性載荷
港口機械的起升機構是典型的位能性載荷,其作業方式、作用頻次和載荷大小還具有很大的不確定性和可變性。
3)承受反復作用的循環載荷
循環載荷作用是港機的一個典型受力特征,重復短時反復作用,載荷歷程呈周期性,具有疲勞載荷的典型特性。
慣性特征
港口機械工作機構之間具有很大的慣性差異,且在工作過程中均頻繁的起制動,頻繁加、減速運行,造成其慣性載荷比較突出,且隨機作用,隨機變化。
2.起升減速裝置失效分析
起升機構是起重機工作級別Z高的機構,承受位能性載荷,工作速度變化范圍大,小慣量機構,減速裝置的失效主要為高速軸變形和斷裂,輪齒疲勞失效等。
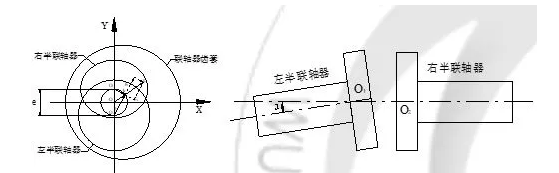
高速軸變形和斷裂原因
1)聯軸器不對中
附加徑向力:
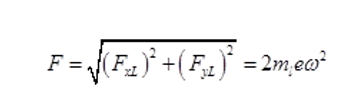
附加離心力:
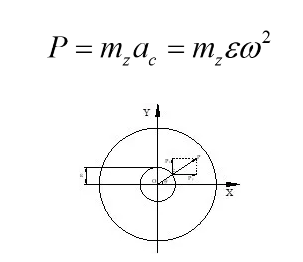
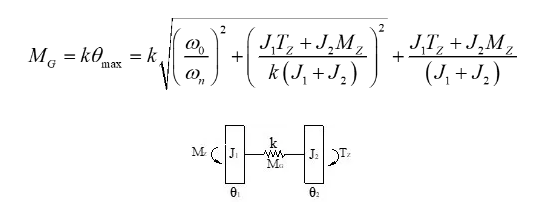
附加慣性力矩:
齒輪疲勞失效原因
1)抓斗工況開閉機超載
抓斗作業工況下,開閉繩載荷不均勻系數有兩種選取方法,按老的教科書推薦取值為0.66,按《起重機設計規范-2008》推薦,在變頻調速控制下,當抓斗閉合時可檢測控制支持繩和開閉繩載荷均衡,系數可取值為0.55。但是在絕大多數情況下,抓斗閉合時支持繩和開閉繩載荷并不能有效控制在均衡狀態,從而造成抓斗開閉機傳動系統過載,致使減速裝置早期疲勞失效。
2)減速裝置使用系數的取值
減速裝置使用系數是將包括工作級別、動載荷、沖擊、機構慣量、載荷性質、工作環境等影響因素進行綜合考慮而取的一個安全系數,但實際上選型者對各個因素的認識差異,很難準確把握各個因素的影響程度,從而造成使用系數取值過大或過小,影響減速裝置使用壽命。
3.回轉減速裝置失效分析
回轉機構是港口臂架起重機中的重要工作機構,承受雙向回轉載荷作用,大速比、大慣量。減速裝置多采用立式行星傳動,其失效主要為高速軸斷裂,行星架損壞,低速軸斷裂,小齒輪斷齒等。在起重機所有的工作機構中,回轉傳動的故障出現Z多。
斷軸失效分析
1)高速軸斷軸原因
行星傳動高速級斷軸主要是電機過載力矩所引起。在采用繞線電機驅動,切電阻調速的情況下,當機構啟動加速時間過短,電機短時過載力矩很大,極限力矩聯軸器失效時,可能造成輸入軸斷裂。另外傳動系中聯軸器不對中也會增加斷軸影響。
2)低速軸斷軸原因
行星傳動低速級斷軸主要是由系統慣性力和沖擊載荷所引起,與電機正向傳動沒有關系。極限力矩聯軸器在反向傳動中對系統沒有任何保護作用,一方面是由于慣性、沖擊載荷作用時間短,可以迅速在系統低速級產生破壞;另外由于系統具有彈性,速比又較大,所以慣性、沖擊載荷還來不及傳到聯軸器,低速級的某些部件可能早已經損壞了。
齒輪及行星架失效分析
1)輸出軸小齒輪斷齒原因
行星傳動輸出小齒輪與大齒圈嚙合的齒側間隙過大或過小時,會造成回轉沖擊或齒輪咬合,特別是正反向反復作用時從而造成小齒輪斷齒失效,外載荷來源主要是慣性力。
2)傳動齒輪及行星架失效原因
行星傳動有中心齒輪、行星齒輪和行星架。港機使用的行星減速裝置中心齒輪、行星齒輪和行星架的失效基本與低速軸的失效同行,受反向傳動載荷影響比較大。相對于中心齒輪,行星齒輪和行星架更弱一些,總是Z先損壞。
關于極限力矩聯軸器的保護作用
極限力矩聯軸器是為了保護回轉傳動系統在事故性超載狀態下不發生破壞,通常安裝在傳統動系統的高速端,計算極限摩擦力矩為1.1Mmax(電機Z大驅動力矩)。從港口起重機的實際使用情況看,極限力矩聯軸器只能對電機正向輸入力矩起到限制作用,從而保護減速傳動裝置的高速級。對于造成減速傳動裝置主要失效的的制動慣性力,沖擊力,事實上起不到保護作用,因此,可以考慮對于變頻調速的驅動系統取消回轉極限力矩限制器(變頻電機的輸出力矩可由變頻器控制)。
4.“三合一”傳動裝置失效分析
三合一傳動大量使用在港口機械的運行機構中,通過多臺套進行分別驅動,也經常出現斷軸失效。
由于運行不同步造成的斷軸
港機大車運行不同步總是存在的,如果傳動裝置的載荷長期處于分配不均勻狀態,容易造成驅動單元損壞,特別是大跨度的軌道龍門吊。
由于安裝方式不正確造成的斷軸
對于具有回轉慣性沖擊載荷的門座起重機,“三合一”傳動的大車驅動單元若采取底座式安裝,由于不能吸收回轉振動和沖擊,補償沿軌道方向的運動,將會造成減速裝置漏油、斷軸等損壞。所以大車“三合一”傳動必須采用浮動安裝,并具有吸收振動沖擊的措施。
03 港機減速裝置的選型與安全應用
1、減速裝置的選型
選型方法
減速裝置的選型參數:高速軸輸入轉速、輸入功率和傳動比;
驗算參數:輸出軸的徑向力。
通常是根據輸入轉速、傳動比選取許用輸入功率,再考慮一個使用系數使其大于計算功率。
使用系數的取值
1)通用設計取值原則
使用系數是減速裝置選型中可變性比較大的參數,它包含三個影響因素,即工作時間、起制動頻數和慣性增加系數(所有外部轉動慣量與電機轉動慣量之比),將各自的影響按權重大小取值獲得Z終的使用系數值。這些都是從通用設計原則來考利的,對任何機械都適用。
2)針對港口機械的適用性取值
減速傳動裝置沒有港機專用的設備,針對港口機械的構造、作業和受力特征,應考量其實用性取值。除遵循通用設計取值原則外,還應該考慮:使用環境(溫度條件)、載荷狀態(散貨抓斗、集裝箱、件雜貨作業)、載荷性質(位能性、平移性)、運行方向(單向、雙向),充分了解和準確把握對象機型的使用工況條件和特點,做到盡可能合理選擇。如門座起重機,起升、回轉機構的使用系數要取到1.5~2左右,變幅在1.2~1.4、大車運行1.1~1.3之間。
減速器各級傳動應該是按等強度原理設計,但實際考利到系列成組有一個覆蓋原則,從而造成減速箱不同級的強度富余量的差異,故在相同的使用條件下,有些傳動部件出現提前失效情況,選型時應考慮到。
2、減速傳動裝置的安全使用
減速傳動裝置作為港口起重機的Z基礎部件,其狀態對整機的正常工作和安全都會帶來直接的影響,從目前發生失效的案列看,除了設計選型等方面的問題外,安全使用也是一個很重要的方面。
(1)起重負荷的檢測與控制
超負荷限制器是檢測和控制起重機工作載荷的保護裝置,應該保持要求的精度和正確的檢測方法。抓斗起重機起升繩和開閉繩的負荷應獨立檢測和分別統計,嚴格控制開閉繩的超負荷。超負荷限制器也要正確判斷動載峰值和工作超載荷,做到合理避峰和限制超載荷。
(2)傳動速度的檢測與控制
減速裝置輸入、輸出速度的穩定和正確,是影響傳動系統及減速裝置工作安全的重要因素。對減速裝置輸入、輸出速度應進行有效實時監測和控制,對4級變頻電機超頻的調速范圍應嚴格控制,如超過2000r/min必須采取包括動平衡試驗等相應措施。位能性工作機構超速是Z危險的事故,應嚴格控制和避免。對系統輸出速度的檢測應獨立于輸入端的檢測,并進行各自獨立的控制。
(3)動載荷峰值的檢測與控制
動載荷峰值主要出現在工作機構的啟動和制動階段,對于大慣量機構動載荷的峰值應該采取控制措施。
如港口門座起重機的回轉機構,有變頻調速,有切電阻調速控制方式。啟動時可通過控制啟動加速時間和電機的輸出扭矩有效削減動載荷峰值,但制動時主要是通過制動裝置消耗系統的能量,制動時間由司機控制所以難免會出現動載峰值過大造成傳動部件受損。所以對門機回轉機構應盡量采用變頻調速控制,變頻變力制動。
若在進行制動操作時能檢測系統的運行速度,結合系統質量,在設定的制動時間范圍內給以合適的制動操作力,從而實現智能制動,將會有效的防止系統過載,保護傳動裝置免受損壞。
(來源:中港技術)